電波も届かない水中を全自動調査…極寒にも耐える「MONACA」
海から巨大な物体が出現した。
引き揚げられたのは、四角い形をした謎の人工物。実はこれこそが、地球に残された最後のフロンティアに挑むロボットだ。

7月5日。台風の影響で不安定な天候のなか、静岡県下田沖の海に研究チームがいた。東京大学の巻俊宏さん、山縣広和さん、山本和さん。3人は、前人未踏のプロジェクト成功のカギを握る全自動潜航可能、自律型海中ロボット「MONACA(モナカ)」の開発メンバーだ。
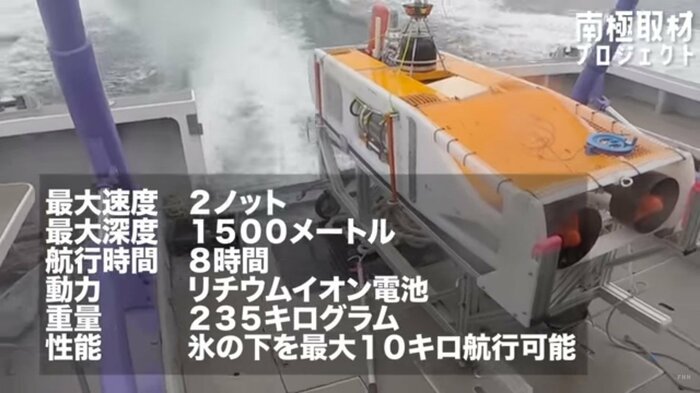
〈MONACA〉
最大速度 2ノット
最大深度 1500メートル
航行時間 8時間
動力 リチウムイオン電池
重量 235キロ
性能 氷の下を最大10キロ航行可能
ーーMONACAのミッションは?
「MONACA」開発チームリーダー 巻俊宏さん:
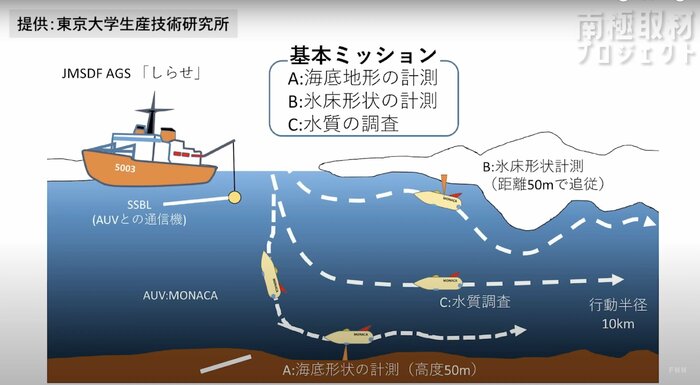
「氷の地形をとってくる」というのが大きなミッションです。MONACAは人が指示することなく全自動で海の中を調査するロボットで、南極では最大3キロ氷の下に行くことができます。陸上の形は人工衛星や飛行機で分かるんですが、水中にはどのくらいの深さまで氷があるのか分からない。そこでロボットが直接海の中に入って計測すると正確に分かるわけです。

ーー難しい点は?
「MONACA」開発チームリーダー 巻俊宏さん:
水中だと電波が使えない。ラジコンとかドローンは電波で操縦しますが水中では使えません。その代わりに超音波をつかって通信はできるんですけど、電波に比べて非常に通信が遅くて不安定。ディレイ(遅れ)があるので遠隔でラジコン操作は不可能だし、ケーブルをつけると氷にひっかかってしまう。なのでロボットは、人の指示を受けないでほぼ全自動で動かないといけません。そこが難しいポイントだと思います。

超音波による信号の受信は3キロで4秒ほど遅れるという。この遅れは、安全に操縦することができない致命的なリスクであり、そのためにロボットが自力で航行することが求められているのだ。さらに南極ならではの難しさも。
「MONACA」開発チームリーダー 巻俊宏さん:
普通の海だったら浮上すればいい。つまり潜水機にトラブルがあれば、その場で浮上する。ただ、氷の下だと氷に引っかかっちゃうので、回収ができない。信頼性を高めるか、異常がおきた場合、浮上させずに船のそばまで帰ってこさせるという、そういう制御が必要となります。
あと寒さですね。-10℃とかになってくるとロボットが凍ってしまいます。圧力センサーが凍ると水圧が測れない。自分がどのくらいの深さにいるか分からない。プロペラが凍ったら動けなくなります。凍り付かないような対策も必要。そういった意味では南極の氷の下を走行するというのは、非常に難しいミッションです。

MONACAのテスト航行…結果は?
いよいよ静岡県下田沖の海で実験を開始する。MONACAが潜っていく。見えなくなったあとは、モニターで位置や状況を確認するしかない…。
しかし、浮上する時間になっても姿を現さないMONACA。メンバーに緊張した空気が漂い始めた。

「いた!いた!」
数分後…。MONACAが無事、自力で戻ってくることを確認し、安堵の表情となるメンバー。
研究チームは、国内でのテスト航行を重ね、第64次南極地域観測隊の一員として、2022年11月に砕氷船しらせで日本を出発、南極大陸ラングホブデ氷河の棚氷域でMONACAによる観測調査を行う予定だ。
【動画を見る】




