プレスリリース配信元:国立大学法人千葉大学
千葉大学大学院工学研究院の劉浩教授らの研究チームは、スズメガ(Manduca sexta)の前進飛行において、翅(はね)の付け根である「翅ヒンジ」の弾性と自然な羽ばたき翼振動が、飛行の安定性にどのように寄与しているかを、最新の流体-構造連成(FSI)モデル(注1)を用いて明らかにしました。昆虫が複雑な神経制御を最小限に抑えつつ、受動的な力学メカニズムによっていかに頑健な飛行を実現しているかという謎に迫る本研究は、バイオミメティック飛行ロボットの制御簡素化と安定性向上に寄与することが期待されます。
本研究成果は、Journal of the Royal Society Interfaceに2026年4月1日に掲載されました。
(論文はこちら:10.1098/rsif.2025.1011)
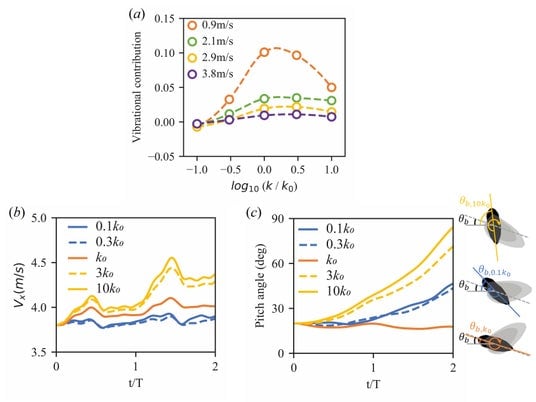
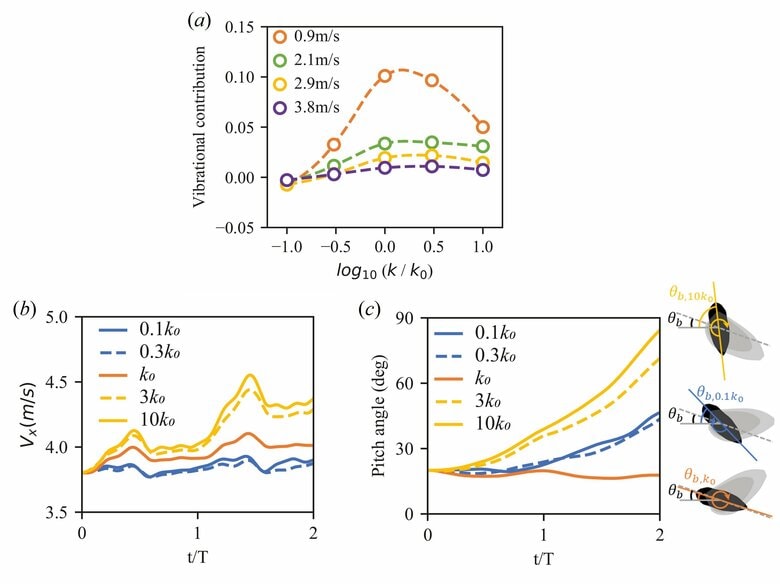
図:振動安定化の飛行速度依存性(a)と翅ヒンジの剛性依存性:全身速度(b)、ピッチ角(c)
■研究の背景
飛翔昆虫は、翅や体の高速な振動を利用して飛行を安定させる「振動安定化(Vibrational Stabilization)(注2)」という独自のメカニズムを持っています。これまでの研究では、主にホバリング(空中停止)時の安定性が議論されてきましたが(参考文献1.2)、広範囲な前進飛行速度において柔軟な翅ヒンジがどのように影響するかは未解明でした。そこで研究チームは、弾性的な翅ヒンジと非定常な羽ばたき翼空気力学を統合した計算モデルを開発し、ホバリングから高速飛行までの受動的安定性を網羅的に評価しました。
■研究成果のポイント
1. 「柔軟な翅ヒンジ」と「広範な速度域」の統合解析: 柔軟な翅ヒンジの動態と、0.9 m/sから5.0 m/sに及ぶ多様な前進速度を振動安定化の枠組みに初めて統合し、翅の高速振動と体の挙動の同期(シンクロナイゼーション)を詳細に解析。
2. ステージ依存型の安定化戦略の発見: 飛行速度に応じて安定化の主役が変化することを発見。
3. 低速飛行時: 翅の振動によって生じる「振動剛性(Vibrational Stiffness) (注3)」がばねのような復元力を生み出し、ピッチ方向の安定性を維持。
4. 高速飛行時: 速度が上がるにつれて振動剛性の寄与は減少し、代わりに空気力学的な「減衰効果注4)」が安定化を支配するようになる。
5. 最適化された生体ヒンジ剛性: スズメガの実際の翅ヒンジの硬さ(弾性)が、振動安定化を最大化し、外乱に対する姿勢回復を速めるのに最適な値に調整されている。
■今後の展望
今後は、スズメガよりも羽ばたき周波数が高くサイズが小さいハチなどの昆虫において、同様のメカニズムがどのように機能するかを解明する必要があります。また、仮想筋肉モデルなどのAI駆動型シミュレーション枠組みを統合し、より複雑な環境下での最適な飛行戦略を探求することが期待されます。
■用語解説
注1)流体-構造連成 (FSI) モデル: 流体(空気)の動きと構造物(翅や体)の変形・運動の相互作用を同時に計算するシミュレーション手法。飛行中の力や変形を高精度に解析するために用いられる。
注2)振動安定化 (Vibrational Stabilization): 高速な羽ばたき振動により、時間平均的に復元力が生じ、飛行姿勢が安定化する現象。
注3)振動剛性(Vibrational Stiffness): 高速な羽ばたきによって生じる、仮想的なばねのような復元力の性質。特に低速飛行時の姿勢安定に寄与する。
注4)減衰効果(Damping Effects): 空気抵抗が回転運動に対するブレーキとして働き、特に高速飛行時にはその効果が大きくなり、姿勢の揺れを素早く抑えるメカニズム。
■参考文献1)
タイトル:Vortices and forces in biological flight: insects, birds, and bats
著者:Hao Liu, Shizhao Wang, Tianshu Liu
雑誌名:Annual Review of Fluid Mechanics
DOI:10.1146/annurev-fluid-120821-032304
■参考文献2)
タイトル:Vibrational control: a hidden stabilization mechanism in insect flight
著者:Haithen E. Taha, Mohammadali Kiani, Tyson L. Hedrick, Jeremy S. M. Greeter
雑誌名:Science Robotics
DOI:10.1126/scirobotics.abb1502
■研究プロジェクトについて
本研究は、日本学術振興会(JSPS)の科学研究費助成事業(No. 19H02060、23H01373)による支援を受けて行われました。
■論文情報
タイトル:Passive pitch rotation enables optimal vibrational stabilization in hawkmoth forward flight
著者:Yujing Xue, Xuefei Cai, Hao Liu
掲載誌:Journal of the Royal Society Interface
DOI:10.1098/rsif.2025.1011
企業プレスリリース詳細へ
PR TIMESトップへ