プレスリリース配信元:株式会社ポケット・クエリーズ
- 2025年7月の構想発表から実現場への適用・有用性の検証フェーズへ -
株式会社ポケット・クエリーズ(本社:東京都新宿区 代表:佐々木宣彦、以下当社)は、株式会社鴻池組(本社:大阪市中央区 代表:渡津弘己)と2025年7月に発表した「四足歩行ロボットによる施工管理自動化プロジェクト」において、山岳トンネル建設現場の切羽(掘削最前線)における実証実験を2026年2月8日に実施しました。
本検証は、山岳トンネル掘削において最も危険を伴う「切羽(きりは)」での作業環境を対象に、四足歩行ロボットを用いた無人探査の可能性を追求したものです。
前回リリースでの「技術構想」の段階を経て、この度、実現場での無人探査およびデータ取得に成功し、実用化に向けた大きな一歩を標榜する「技術証明」を達成いたしました。

危険エリアに進入する四足歩行ロボット:Unitree B2-W
【実証実験の具体的な成果】
今回の実証実験では、実際の山岳トンネル切羽において以下の3点を中心に実施し、有効なデータが取得できることを確認しました。
危険エリアへの完全無人探査発破直後の地山崩壊や肌落ちの危険がある切羽に対し、人間が立ち入る前に四足歩行ロボットが先行して進入。複雑な凹凸を伴う不整地においても、自律走行および遠隔操作による安全確保が可能であることを実証しました。

リアルタイム有害ガスモニタリングロボットに搭載したガス検知センサーにより、切羽近傍の酸素濃度および可燃性・有毒ガスの有無をリアルタイムで遠隔監視。人間の代替として環境の安全性を客観的な数値で判定し、入坑可否を迅速に判断する体制を構築しました。

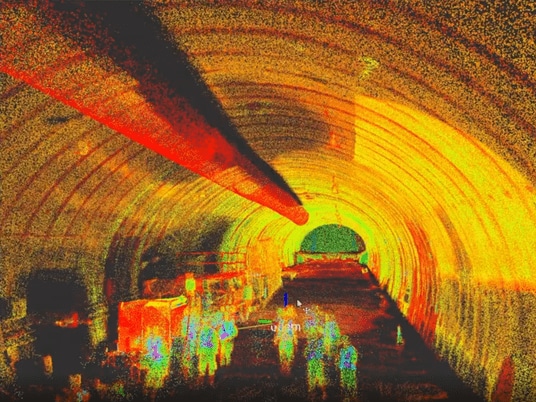
LiDARによる3D点群データの高精度取得レーザーを用いたLiDAR計測により、切羽および坑道の形状を3D点群データとして取得しました。
取得データはBIM/CIMモデルとシームレスに連携可能であり、施工管理のデジタル化および経時的な形状変化のモニタリングに寄与することを確認しました。
【今後の展開:現場の課題解決に向けて】
本実地検証を通じて、実用化に向けた具体的な技術的課題も明確化されました。
今後は以下の項目に焦点を絞り、さらなる堅牢性の向上を目指します。
複雑地形へのさらなる適応:地山崩壊後のより過酷な不整地における歩行安定性の向上
長時間運用の確立:連続稼働時間および通信安定性の強化による、広範囲な自律パトロールの実現
BIM/CIM連携の自動化:取得した点群データから施工進捗を自動解析するアルゴリズムの実装
本プロジェクトは、単なる一過性の実証実験に留まるものではありません。
ポケット・クエリーズと鴻池組は、今回の成果を「次世代の標準」へと昇華させるべく、建設現場の安全性と生産性を根本から変革する技術開発を継続してまいります。
四足歩行ロボットが切羽の最前線に立つことで、人はより安全な場所で、より高度で創造的な意思決定に専念できる。そんな建設環境の実現に向け、両社は確実な歩みを進めて参ります。
 株式会社ポケット・クエリーズ
株式会社ポケット・クエリーズ
ポケクエは第一線現場をお持ちのお客様が抱える『人財不足』をテーマに技能継承/省力化/多能工化を目的とした現場向けDXツールを多く開発。またこれらの領域に、生成AI技術を活用した技術検証・実運用を実現。
本 社 :東京都新宿区西新宿3-20-2 東京オペラシティタワー52F
代表者 :代表取締役社長 佐々木 宣彦
事業内容:ロボティクス/IoT事業,VR/AR/MRの実用アプリケーション開発,3D-CG事業
HP :https://www.pocket-queries.co.jp/
企業プレスリリース詳細へ
PR TIMESトップへ