

公園の維持管理を“四足歩行ロボットとAI”で自動化
広い公園となると、建物や設備の点検、植生状況の把握などは大変だろう。そのような中でNTTコムウェアが、四足歩行ロボットやAIの画像解析技術などを活用し、公園の維持管理を自動化する「自動巡回点検検証」の実証実験を2月中旬から始める。
場所は奈良市の国営平城宮跡歴史公園だ。
この実証実験は、AI やIoT などの新たな技術を活用し、公園の抱える課題の解決などを目指す社会実験「平城宮跡歴史公園スマートチャレンジ」の一環。
2月中旬から始める実証実験では、「点検しづらい植生エリアの点検」や「体調不良と思われる来園者・ごみや落とし物の発見」「倒木・落枝につながる樹木の危険予兆」といった公園内の維持管理業務を、“自動運転の四足歩行ロボットの巡回による画像データ収集”と“AI画像解析技術”、“3D地図”を組み合わせることで、自動化することが可能かどうか、検証するという。
現状の点検などは、基本的には人が見て回っていたはずだ。国営平城宮跡歴史公園は、甲子園球場が約30個も入る広さとのことなので、その管理・巡回を省力化できるのであれば喜ばしいことだろう。
実証実験は3月までとのことだが、具体的にはどのようにして行うのか? また、公園の維持管理の自動化はいつ頃、実現するのか?
NTTコムウェアの担当者に話を聞いた。
実証実験の具体的な流れ
――このような実証実験を行う目的は?
NTTコムウェアならびにNTTグループは、スマートシティの実現に向けて、都市における社会課題の解決支援に取り組んでいます。
今回、都市の一環である、公園に関する維持管理の高度化(スマート化)において、当社が通信インフラ(NTTの局舎、鉄塔、電柱など)の維持管理で培ってきたノウハウ、およびAIやIoTなどの技術が活用できると考えたため、「平城宮跡歴史公園スマートチャレンジ」の社会実験に参画しました。
――「自動巡回点検検証」の実証実験、具体的にはどのように行う?
以下の流れで実施します。
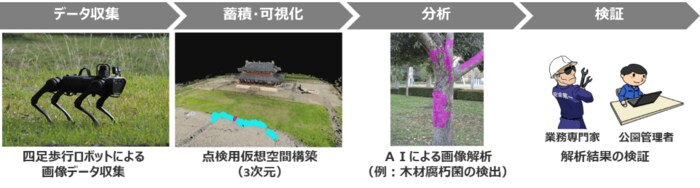
<1>平城宮跡歴史公園の地図上に、四足歩行ロボットを自動歩行させるルートを設定し、四足歩行ロボットにルートを記憶させます。
<2>設定されたルートどおりに、四足歩行ロボットが公園内を自動で歩行します。ロボットは歩行中、頭部に設置されたカメラで、随時、写真を撮影します。
<3>撮影した写真を、クラウド上に保存します。
<4>クラウド上に保存された写真を、AIが自動で異物や不具合(例えば、危険な木など)と思われる物体が写っていないか、判定します。
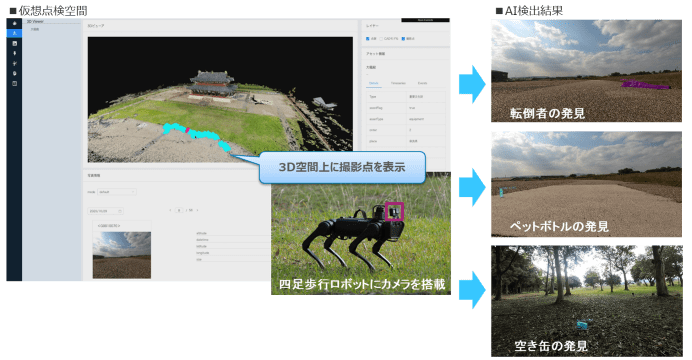
<5>AIが異物や不具合と思われる写真を発見すると、該当の写真とその写真に写っている異常が何か、またその写真の撮影された場所を、平城宮跡歴史公園の3D地図上に表示します。
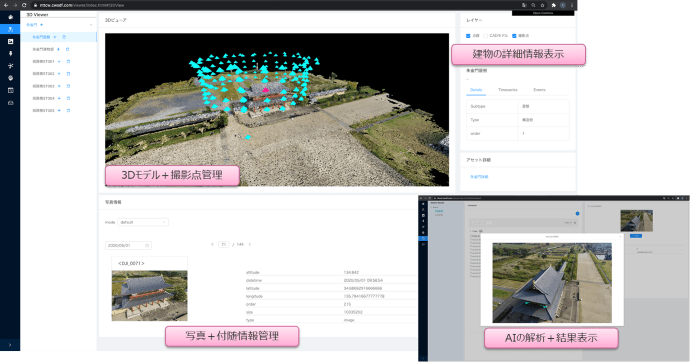
<6>公園の運用管理者は、3D地図上で異常を確認し、必要な対応を行います。
体調不良と思われる来園者を発見したら?
――ロボットの巡回で体調不良と思われる来園者を発見したら、それをどうやって知らせる?
体調不良者について、今回の実証実験では「転倒者」の発見を対象にしています。
「転倒者」の発見の流れは、四足歩行ロボットの巡回中に撮影した写真を、位置情報を含めてクラウドに取り組み、AIを用いて写真の異常を検出し、転倒者がいた場合、その場所と写真を地図上にプロットします。
今回の実証実験においては、写真の取り込みを手作業で行い、転倒者の検出を行いますが、実際の運用に向けては、リアルタイムに検出・通知する仕組みを見込んでいます。
なお、リアルタイムにクラウドに写真を取り込み、AIが異常を検出する仕組み自体は、別の実証実験で確認しています。
――不審者も発見できる?
今回の実証実験においては、不審者の発見は対象としておりません。今後、検討の対象に含まれてくるものと考えています。
――今回の実証実験で四足歩行ロボットを選んだ理由は?
NTTコムウェアは昨年度より実証実験に参加しており、昨年度は電動カートを改造し、自動運転機能を搭載させて、実施しました。
その結果、“電動自動カート”は、屋内や舗装道路といった整備された環境では有効であったものの、屋外シーンには適しておらず、公園の維持管理には不向きなことが分かりました。
その点、四足歩行ロボットは、公園内の砂利道や草地などの地面が不安定な場所での走行が可能であり、段差を越えられる機種もあるため、今年度の実証実験の対象として選びました。
実現はいつ頃?運用面の課題は?
――公園の維持管理の自動化。こちらの実現はいつ頃になりそう?
今は研究開発の段階で、ロボットの今後の開発スケジュールにも左右されるため、具体的な実現時期は未定です。
――現時点で見えている課題は?
課題は多く、例えば、ロボットのコストや一般の公園管理者が容易に運用できる運用性の実現、異常を検出した際の通知方法の検討です(転倒者の発見など即時性の高い異常については緊急通報できる仕組み)。
一方で、樹木の腐朽(=腐って形が崩れること)などについては、経年で観察し、定期的に通知できる仕組みなどがあります。
今回の実証実験を通じて、どのような点が現実的な課題になるか、整理・検討していきたいと考えております。
国土交通省のサイトでは、スマートシティを「都市の抱える諸課題に対して、ICT等の新技術を活用しつつ、マネジメント(計画、整備、管理・運営等)が行われ、全体最適化が図られる持続可能な都市または地区」と定義している。
今回の実証実験も、スマートシティへの実現につながる一つのケースとなることだろう。
【関連記事】
四足歩行ロボ「Spot」を鹿島建設が土木工事現場に導入…何ができるのか聞いてみた
デザインのモチーフは牛?クボタの完全無人“自動運転トラクター”がかっこいい




