「踊り食い」を経験したことがある人もない人も、ぜひ想像してほしい。“静止”している食べ物と元気に“動いている”食べ物、それぞれを口に入れた時、どんな感覚を抱くだろうか。
そんな疑問について、電気通信大学と大阪大学の研究グループが「動くロボットを食べた時の知覚・味覚・食感」についての調査を行い、その実験結果を発表した。

実験を行ったのは、電気通信大学大学院・情報理工学研究科の仲田佳弘准教授らの研究グループ。

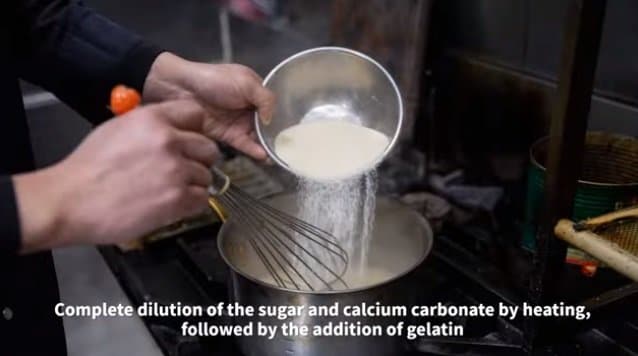
行われた実験は、ゼラチンと砂糖を主原料とした「食べられるロボット」を作り、実際に食べるというものだ。
「食べられるロボット」を前後左右に振動させて実験
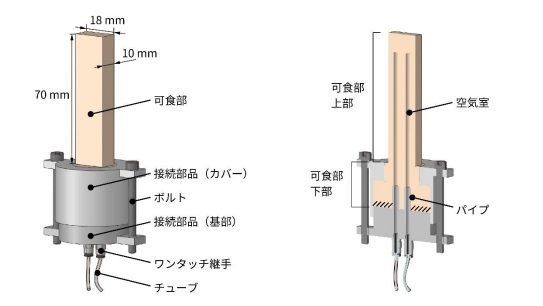
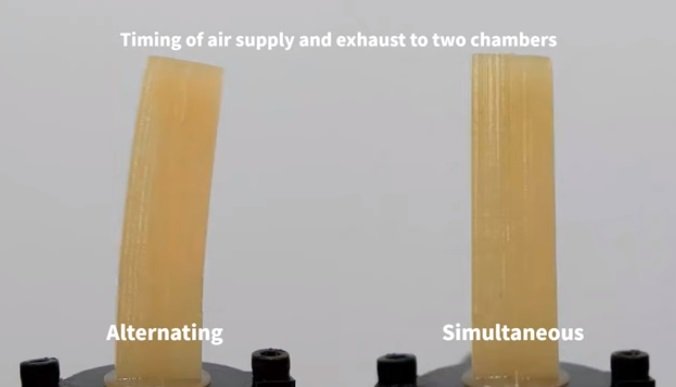
このロボットの“可食部”は「市販のグミ程度の硬さ」になっていて、可食部の内側には2つの空気室がある。ここに空気を通すことで可食部を縦方向(前後)・横方向(左右)の2種類に振動させた。
実験には大阪大学の学生16人(男性10人・女性6人)が参加し、第一の実験では、参加者が「ロボットの見た目からどのような印象を受けるか」について調査。第二の実験では、参加者が「実際にロボットを食べてどう感じるか」について評価したという。
この結果、第一の実験では、動くロボットを見たときに「縦方向に振動(縦揺れ)するよりも、横方向に振動(横揺れ)する動作に対して生きているような感覚を強く抱く」ことが判明。
また第二の実験では、第一の実験でより「生き物らしい」とされた、横方向に振動するロボットを使用。「動いていない状態のロボットを食べた時よりも、動いているロボットを食べた時の方が、ロボットに対して知性・感情・生き物らしさ・罪悪感・新鮮さといった感覚を強く覚える」ことがわかった。
さらに「食感をオノマトペで表現した際、ロボットが動いていない時と動いている時では表現が異なる」という結果に。
これらのことから「ロボットが動いているときに食べると、人の知覚と食感に変化が生じること」が明らかになり、「新たな食体験の創出や医療応用に繋がる」ことが期待されるという。
「ムニャムニャ」から「コリコリ」食感に変化
たしかに、同じ味や食感のものでも、動かないものを食べる時よりも、ピチピチと動いているものを食べる方がより「生きているものを食べている」という感覚が湧く。食感や味わいが違って感じられるというのは想像できる。
しかし研究チームによると、この実験は「世界初」の試みだという。この実験で新たに分かったことや、今後どんなことに繋がっていくのかについても興味が尽きない。
電気通信大学の仲田佳弘准教授、詳しくお話を伺った。
――「動くロボットを食べる」、この実験を始めた経緯は?
元々、生き物らしいロボット・動きの生き物らしさに興味があり、アンドロイドを使った研究などを行ってきました。こうした研究の中で「食品の生き物らしさ」に興味を持ったというのが発端です。
我々は「おいしい肉は食べたいけれど、動物が解体されるところは見たくない(Meat paradoxと呼ばれています)」という考えを持っていると言われています。そのため元々、食物が生き物であったことを意識しないことが多いと思います。
一方で、動物をかたどったクッキーがあったり「生き物の命に感謝して食べましょう」というように教わったりと、食に対する認識は様々で、この点が面白いと思いました。
食品を動かしながら食べることができれば、実際に生物を使わなくても、統制の取れた実験ができるのも利点です。
ここで「食べられる素材を使ったロボットの研究」について調査したのですが、食べられるロボットを開発する研究は多数あるものの、それを実際に食べて、その時の印象を調べた研究が無いことに気が付きました。(「錠剤のようなロボットを飲み込む」という形で実際に体にロボットを入れる研究はあります。通常、我々が食物を食べるように「咀嚼して食べる」研究がありませんでした)
そのため、動く部分が全て食べられて、噛む直前まで動かせる「食べられるロボット」を開発することになりました。
――「縦揺れ」「横揺れ」で抱く印象に差が出たのはなぜ?「横揺れ」の動きは「生き物っぽさ」が強いということ?
これは食べる実験ではなく、見た目から受ける印象を評価した実験です。これについてはアンケートで印象を問う以上の深い評価をしていないので、なぜ印象が異なったのかに関して明確な答えをすることが難しいです。
製作したロボットはそれ自体では移動ができません。このような状況で「生き物らしさを感じる動き」が縦揺れよりも横揺れであった可能性はあります。(ただし、論文中でここまでの考察は行っていません)
また、今回のロボット固有の課題として、横揺れと比較して縦揺れの動きが小さいというものがあり、縦揺れの印象が弱かった可能性があります。これについては今後、改善していく必要があります。

――では「止まっている」ロボットと「動いている」ロボットを食べた時の「食感の差」とは、具体的にどのようなものだった?
これは、実際に食べて評価したものです。食べたものの食感を表現することは容易ではないと考えられたため、食べることに関連するオノマトペ(「コリコリ」「ガブ」「ムニャムニャ」等)を日本語のオノマトペ辞典から抜き出し、実験参加者に対して選択肢として提示しました。そして実際に食べた後、得られた感覚に近いものを選んでもらいました。
ロボットが静止している条件・動いている条件それぞれについて回答を調べた結果、条件によって異なるオノマトペが使用されたことが分かりました。このことから条件ごとで異なる食感を得たと考えました。
以降の内容はかなり具体的な研究の内容になりますが、静止条件では「ムニャムニャ」が、「ムシャムシャ」「ピチャピチャ」「ボリボリ」「ガツガツ」「ガリガリ」「カリカリ」「クシャクシャ」と比較してより頻繁に選ばれるという結果を得ました。
動いている条件では、「コリコリ」と「ガブ」が、「ボリボリ」「ガツガツ」「ガリガリ」「カリカリ」「クシャクシャ」と比較してより頻繁に選ばれるという結果を得ました。

――実験結果をどう受け止めた?
動いている部分を安全に食べられるようにする段階で苦労があったので、多くの実験参加者の協力を得て、実際に食べる実験ができたこと自体が大きな成果だと考えています。
「踊り食い」のような独自の文化がなぜ生じたかについて、新鮮さや味・食感の変化などの仮説を持っていたのですが、実験を通じて、食感の変化を確認できたことが良かったと考えています(味の変化については確認できませんでした)。
「新しい食体験の創造」「嚥下障害のケア」に応用も?
――この研究は、今後どんな形で生かされていく?
・新しい食体験の創造(エンターテインメント)
・口腔内への刺激による摂食・嚥下障害のケア(医療応用)
・生き物の命を頂くという観点において食育への応用
などを検討しています。
実験によると、動いていないロボットを食べた時は「ムニャムニャ」だった感覚が、動いているロボットを食べた時は「コリコリ」「ガブ」という感覚に変わったという。
仲田氏は「今回の研究結果からは条件によって選択されたオノマトペの頻度が異なったということが確認できたが、どうしてこのような結果になったのかについて理由を述べることは難しい」とのことだ。今後の研究が待たれる状況だ。